Polarization¶
In this section, we modify the model discussed in the epistemic networks section to study the possibility that rational agents might converge on polarized beliefs.
We are implementing the model from:
C. O’Conner, J. Owen Weatherall (2018). Scientific Polarization, European Journal for Philosophy of Science.
Consult the previous section on epistemic networks for an overview of the model.
import numpy as np
import random
import math
from scipy.stats import beta
import networkx as nx
import pandas as pd
from mesa import Model, Agent
from mesa.space import NetworkGrid
from mesa.time import RandomActivation
from matplotlib import animation
from IPython.display import HTML, display
import matplotlib.pyplot as plt
import matplotlib
import seaborn as sns
import mpmath
from mpmath import mp
mp.prec = 100
sns.set()
from tqdm.notebook import tqdm
from itertools import starmap
matplotlib.rcParams['figure.figsize'] = (7, 5)
The key idea is to allow the agents to modify their beliefs using Jeffrey update rather than Bayesian update.
Suppose that \(i\)’s current probability for an hypothesis \(H\) is \(Pr_i(H)\) and she receives some evidence \(E\) about which she is uncertain. Assume that \(i\) assigns the probability \(Pr_f(E)\) to the evidence \(E\). Then, the Jeffrey update is defined as follows:
In the model under consideration, the evidence that agent \(i\) receives is the outcome of the experiment peformed by some other agent \(j\). The key idea is to discount evidence from \(j\) in proportion to the distance between agent \(i\)’s and agent \(j\)’s beliefs.
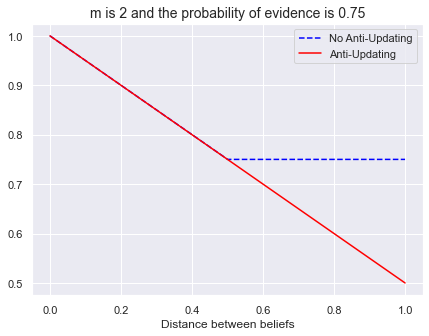
There is a parameter \(m\) representing the amount of “mistrust” of the other agents. Suppose that \(i\) is given evidence \(E\) by agent \(j\). If \(Pr_i(E)\) is the agent’s current probability of the evidence. Let \(d\) be the difference between \(i\) and \(j\)’s belief that the true act has a success rate greater than 0.5. Then, the final probability, \(Pr_f(E)\), can be calcualted in two ways:
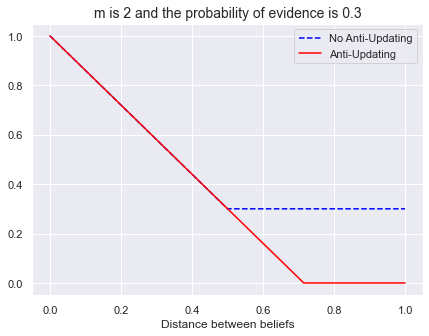
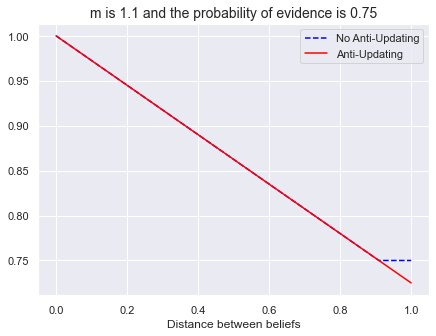
Discounted probability of \(E\): \(Pr_f(E) = 1 -\min(1, d\cdot m) \cdot (1 - Pr_i(E)))\)
Discounted probability of \(E\) with anti-updating: \(Pr_f(E) = \max(1 - d\cdot m(1 - Pr_i(E)), 0)\)
def prob_ev_discount(bel_ev, m, dist):
return 1 - (min(1, dist*m) * (1 - bel_ev))
def prob_ev_antiupdate(bel_ev, m, dist):
return max(1 - (dist * m * (1 - bel_ev)), 0)
m = 2
bel_ev = 0.75
xs = np.linspace(0, 1, 1000)
plt.plot(xs, [prob_ev_discount(bel_ev, m, d) for d in xs], '--',color="blue", label="No Anti-Updating")
plt.plot(xs, [prob_ev_antiupdate(bel_ev, m, d) for d in xs], color="red", label='Anti-Updating')
plt.xlabel("Distance between beliefs")
plt.title(f"m is {m} and the probability of evidence is {bel_ev}", fontsize=14)
plt.legend();
m = 2
bel_ev = 0.3
xs = np.linspace(0, 1, 1000)
plt.plot(xs, [prob_ev_discount(bel_ev, m, d) for d in xs], '--',color="blue", label="No Anti-Updating")
plt.plot(xs, [prob_ev_antiupdate(bel_ev, m, d) for d in xs], color="red", label='Anti-Updating')
plt.xlabel("Distance between beliefs")
plt.title(f"m is {m} and the probability of evidence is {bel_ev}", fontsize=14)
plt.legend();
m = 1.1
bel_ev = 0.75
xs = np.linspace(0, 1, 1000)
plt.plot(xs, [prob_ev_discount(bel_ev, m, d) for d in xs], '--',color="blue", label="No Anti-Updating")
plt.plot(xs, [prob_ev_antiupdate(bel_ev, m, d) for d in xs], color="red", label='Anti-Updating')
plt.xlabel("Distance between beliefs")
plt.title(f"m is {m} and the probability of evidence is {bel_ev}", fontsize=14)
plt.legend();
def generate_prior_two_acts():
pr1 = np.random.uniform(0,1)
return pr1, 1-pr1
def generate_prior(num_acts):
return list(np.random.dirichlet((1,)*num_acts))
class SimpleAction(object):
def __init__(self, prob_success):
assert prob_success >= 0 and prob_success <= 1, f"{prob_success} must be between 0 and 1"
self.prob_success = prob_success
def execute(self, num = 1):
return np.random.binomial(num, self.prob_success)
def pr(self, num_success, total):
assert num_success <= total, f"the successes {num_success} cannot be greater than the total {total}"
return mp.mpf(self.prob_success)**mp.mpf(num_success) * mp.mpf((1 - self.prob_success))**mp.mpf((total - num_success))
def __str__(self):
return f"P(s)={self.prob_success}"
class Learner(Agent):
def __init__(self, unique_id, model, m, known_mean, acts, pos, default_num_trials = 1000, anti_updating = False):
super().__init__(unique_id, model)
self.known_mean = known_mean
self.default_num_trials = default_num_trials
self.acts = acts
self.m = m # parameter
self.anti_updating = anti_updating
self.num_success = 0 # number of successes of the current experiment
self.num_trials = 0 # number of times the current experiment was performed
if len(acts) == 2:
prior = generate_prior_two_acts()
self.pr = {acts[0]: prior[0], acts[1]: prior[1]}
else:
prior = generate_prior(len(acts))
self.pr = {a: prior[a_idx] for a_idx,a in enumerate(acts)}
self.pos = pos
def belief(self, act):
return self.pr[act]
def update_bayes(self, num_success, num_trials):
'''update using Bayes Theorem'''
new_bel = dict()
for act in self.pr.keys():
new_bel[act] = act.pr(num_success, num_trials) * self.pr[act] / sum((self.pr[_a] * _a.pr(num_success, num_trials) for _a in self.acts))
self.pr = new_bel
def update_jeffrey(self, num_success, num_trials, dist):
# assumes that there are two acts and act1 is the act that we are receiving evidence about
act1 = self.acts[0]
act2 = self.acts[1]
pr_ev = self.pr[act1] * act1.pr(num_success, num_trials) + self.pr[act2] * act2.pr(num_success, num_trials)
pr_act1_given_ev = act1.pr(num_success, num_trials) * self.pr[act1] / pr_ev
pr_act1_given_nev = (1 - act1.pr(num_success, num_trials)) * self.pr[act1] / (1-pr_ev)
if self.anti_updating:
discounted_bel_ev = prob_ev_antiupdate(pr_ev, self.m, dist)
else:
discounted_bel_ev = prob_ev_discount(pr_ev, self.m, dist)
new_bel_act1 = pr_act1_given_ev * discounted_bel_ev + pr_act1_given_nev * (1 - discounted_bel_ev)
self.pr[act1] = new_bel_act1
self.pr[act2] = 1 - new_bel_act1
def choice(self):
act = max(self.pr.items(), key = lambda p: p[1])[0]
if act.prob_success > self.known_mean:
return act
else:
return None
def experiment(self, num_trials = None):
act = self.choice()
if act is not None:
num_trials = num_trials if num_trials is not None else self.default_num_trials
self.num_success = act.execute(num=num_trials)
self.num_trials = num_trials
else:
self.num_success = 0
self.num_trials = 0
class BGModel(Model):
def __init__(self, network, m, acts, true_act, known_mean,
default_num_trials = 1000,
anti_updating = False,
bayes_update = True):
self.acts = acts
self.true_act = true_act
self.known_mean = known_mean
self.schedule = RandomActivation(self)
self.network = NetworkGrid(network)
self.m = m
self.bayes_update = bayes_update
self.running = True
# Set up agents
agent_id = 0
for n in network.nodes:
agent = Learner(agent_id,
self,
m, # resistence to learning from others
self.known_mean,
self.acts,
n, # position in network
default_num_trials = default_num_trials,
anti_updating = anti_updating)
self.network.place_agent(agent, n)
self.schedule.add(agent)
agent_id += 1
def converged(self):
if all([a.belief(self.true_act) > mp.mpf(0.99) for a in self.schedule.agents]):
return 1 # beliefs converged on the true act
elif all([a.choice() is None for a in self.schedule.agents]):
return 0 # no longer experimenting
else:
return -1 # undecided
def is_polarized(self):
is_polarized = False
beliefs = [a.belief(self.true_act) for a in self.schedule.agents]
if all([b > mp.mpf(0.99) or b < mp.mpf(0.5) for b in beliefs]) and any([b < mp.mpf(0.5) for b in beliefs]) and any([b > mp.mpf(0.99) for b in beliefs]):
min_belief = min(beliefs)
max_belief = max(beliefs)
is_polarized = self.m * (max_belief - min_belief) >= 1
return is_polarized
def step(self, num_tests = None):
# all the agents perform their experiments
for a in self.schedule.agents:
a.experiment(num_tests)
for a in self.schedule.agents:
if self.bayes_update:
total_success = 0
total_trials = 0
# neighbors include a
neighbors_nodes = [n_pos for n_pos in self.network.get_neighbors(a.pos, include_center = True)]
neighbors = [n for n in self.schedule.agents if n.pos in neighbors_nodes]
for n in neighbors:
total_success += n.num_success
total_trials += n.num_trials
a.update_bayes(total_success, total_trials)
else: # use Jeffrey update
# first update on your own experiment
a.update_bayes(a.num_success, a.num_trials)
# use Jeffrey update on neighbors
neighbors_nodes = [n_pos for n_pos in self.network.get_neighbors(a.pos, include_center = True)]
neighbors = [n for n in self.schedule.agents if n.pos in neighbors_nodes]
for n in neighbors:
if n.num_trials > 0: #n performed an experiment
dist = math.fabs(a.belief(self.true_act) - n.belief(self.true_act))
a.update_jeffrey(n.num_success, n.num_trials, dist)
if self.converged() in [0,1] or (not self.bayes_update and self.is_polarized()):
self.running = False
epsilon = 0.01
num_agents = 5
known_mean = 0.5
true_act = SimpleAction(known_mean + epsilon)
acts = [true_act, SimpleAction(known_mean - epsilon)]
num_experts = 5
default_num_trials = 100
bayes_update = True
anti_updating = False
m = 2
#G=nx.empty_graph(num_agents)
G=nx.complete_graph(num_agents)
nx.draw(G, with_labels=True, font_color='white')
plt.show();
plt.clf()
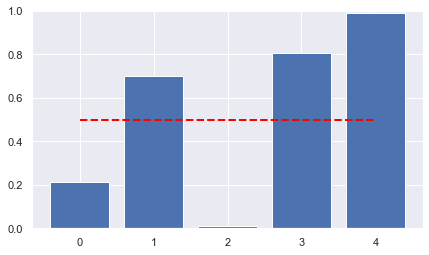
fig, ax = plt.subplots(figsize=(7, 4))
m = 2
model = BGModel(G, m, acts, true_act, known_mean, default_num_trials = default_num_trials, bayes_update = bayes_update, anti_updating = anti_updating)
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents),
'--', color='red',lw=2)
ax.set_ylim(0,1)
plt.show();
def draw_barchart(num):
model.step()
ax.clear()
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents), '--', color='red',lw=2)
ax.set_ylim(0,1)
animator = animation.FuncAnimation(fig, draw_barchart, frames=range(1, 100), interval=1)
HTML(animator.to_jshtml())
<Figure size 504x360 with 0 Axes>
epsilon = 0.01
num_agents = 5
known_mean = 0.5
true_act = SimpleAction(known_mean + epsilon)
acts = [true_act, SimpleAction(known_mean - epsilon)]
num_experts = 5
default_num_trials = 100
bayes_update = False
anti_updating = False
m = 2
#G=nx.empty_graph(num_agents)
G=nx.complete_graph(num_agents)
nx.draw(G, with_labels=True, font_color='white')
plt.show();
plt.clf()
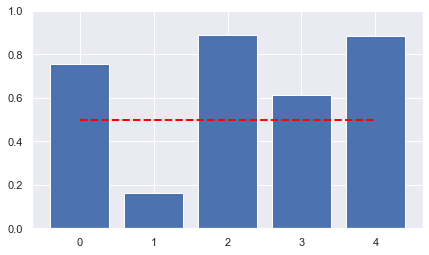
fig, ax = plt.subplots(figsize=(7, 4))
m = 2
model = BGModel(G, m, acts, true_act, known_mean, default_num_trials = default_num_trials, bayes_update = bayes_update, anti_updating = anti_updating)
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents),
'--', color='red',lw=2)
ax.set_ylim(0,1)
plt.show();
def draw_barchart(num):
model.step()
ax.clear()
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents), '--', color='red',lw=2)
ax.set_ylim(0,1)
animator = animation.FuncAnimation(fig, draw_barchart, frames=range(1, 100), interval=1)
HTML(animator.to_jshtml())
<Figure size 504x360 with 0 Axes>
epsilon = 0.01
num_agents = 5
known_mean = 0.5
true_act = SimpleAction(known_mean + epsilon)
acts = [true_act, SimpleAction(known_mean - epsilon)]
num_experts = 5
default_num_trials = 100
bayes_update = False
anti_updating = True
m = 2
#G=nx.empty_graph(num_agents)
G=nx.complete_graph(num_agents)
nx.draw(G, with_labels=True, font_color='white')
plt.show();
plt.clf()
fig, ax = plt.subplots(figsize=(7, 4))
m = 2
model = BGModel(G, m, acts, true_act, known_mean, default_num_trials = default_num_trials, bayes_update = bayes_update, anti_updating = anti_updating)
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents),
'--', color='red',lw=2)
ax.set_ylim(0,1)
plt.show();
def draw_barchart(num):
model.step()
ax.clear()
ax.bar([str(a.unique_id) for a in model.schedule.agents],
[a.belief(true_act) for a in model.schedule.agents])
ax.plot([str(a.unique_id) for a in model.schedule.agents],
[known_mean]*len(model.schedule.agents), '--', color='red',lw=2)
ax.set_ylim(0,1)
animator = animation.FuncAnimation(fig, draw_barchart, frames=range(1, 100), interval=1)
HTML(animator.to_jshtml())
<Figure size 504x360 with 0 Axes>
Further Reading¶
B. Holman and J. Bruner (2015). The problem of intransigently biased agents, Philosophy of Science, 82(5), pp. 956 - 968.
J. Barrett, A. Mohseni, and B. Skyrms (2019). Self Assembling Networks, The British Journal for the Philosophy of Science, Volume 70, Number 1.
R. Fryer and P. Harms and M. Jackson (2019).Updating Beliefs when Evidence is Open to Interpretation: Implications for Bias and Polarization,’’ Journal of the European Economic Association, 17:5, pp. 1470 - 1501.
E. Olsson (2013). A Bayesian simulation model of group deliberation and polarization, Bayesian argumentation, Springer, pp. 113 - 133.